Hi, I’m Zach.
I’m passionate about
zyoder4@gmail.com
I love transforming untested hardware components into highly functional electromechanical systems that solve practical problems. As a senior PhD researcher, I’ve been tackling the challenge of leveraging a new class of electrostatic artificial muscles (HASEL actuators) for robotic systems that outperform their traditional counterparts. I’ve published my work in top journals, won multiple awards for excellent communication, and had a lot of fun.
I’m currently working working with Christoph Keplinger at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany.
Outside of work I love to
Research spotlight.
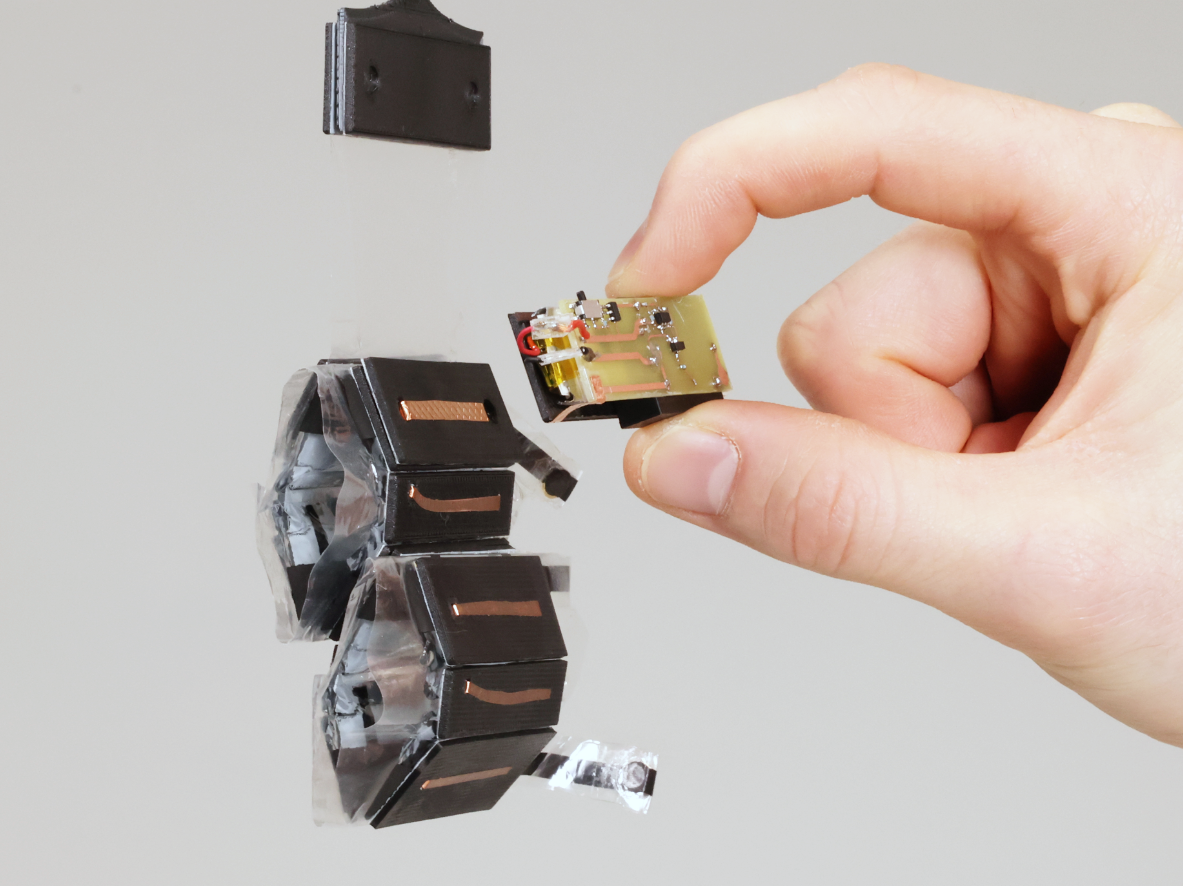
HEXEL modules
[Project page] [DOI]
Hexagonal electrohydraulic (HEXEL) modules produce high-speed, high-strain actuation and snap together to serve as building blocks in reconfigurable robots.

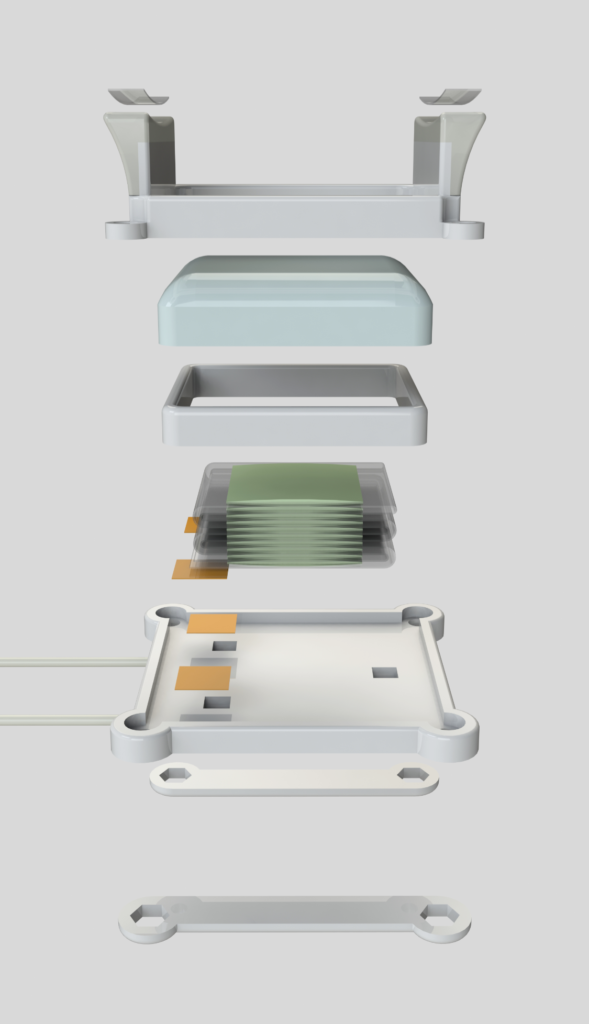
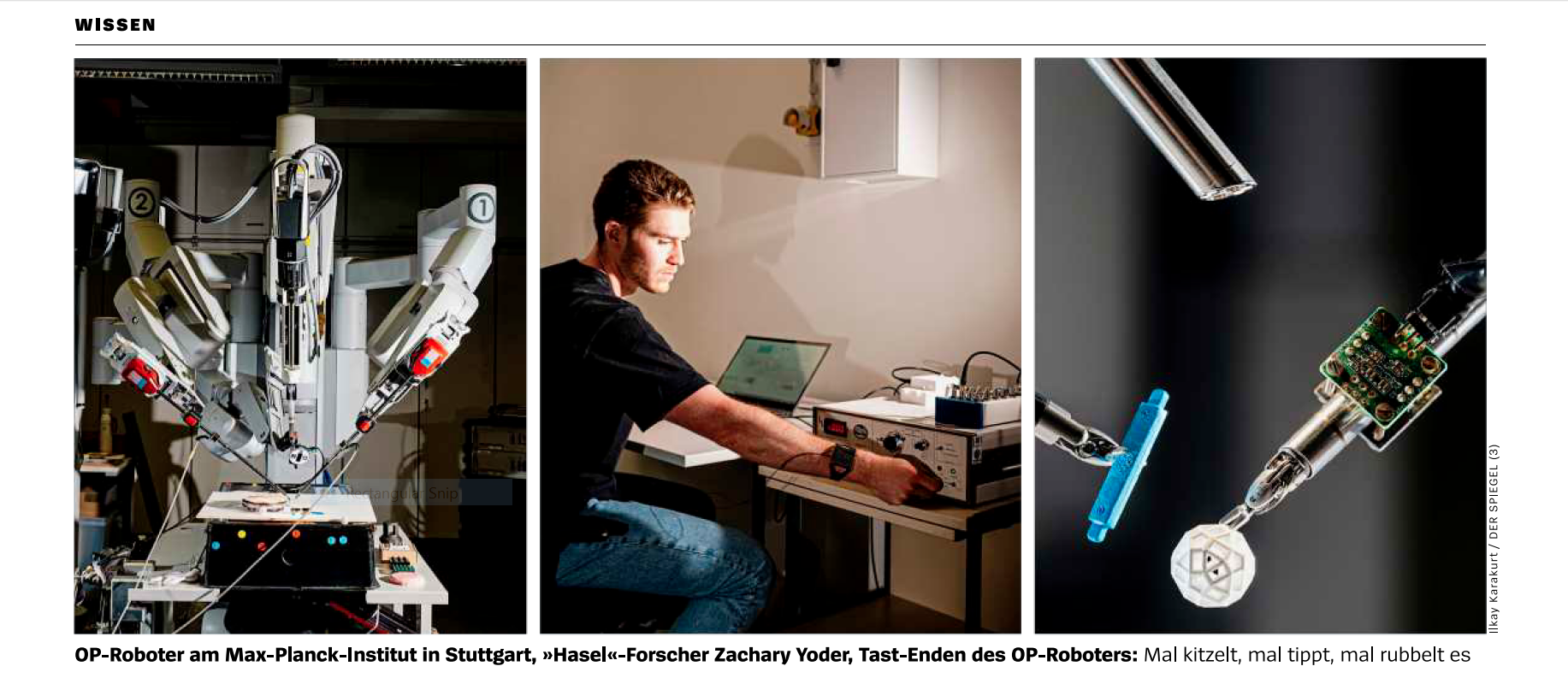
CUTE haptic devices
[Project page] [DOI]
A new class of cutaneous electrohydraulic devices provides unprecedented control over haptic cues delivered to the hairy skin.

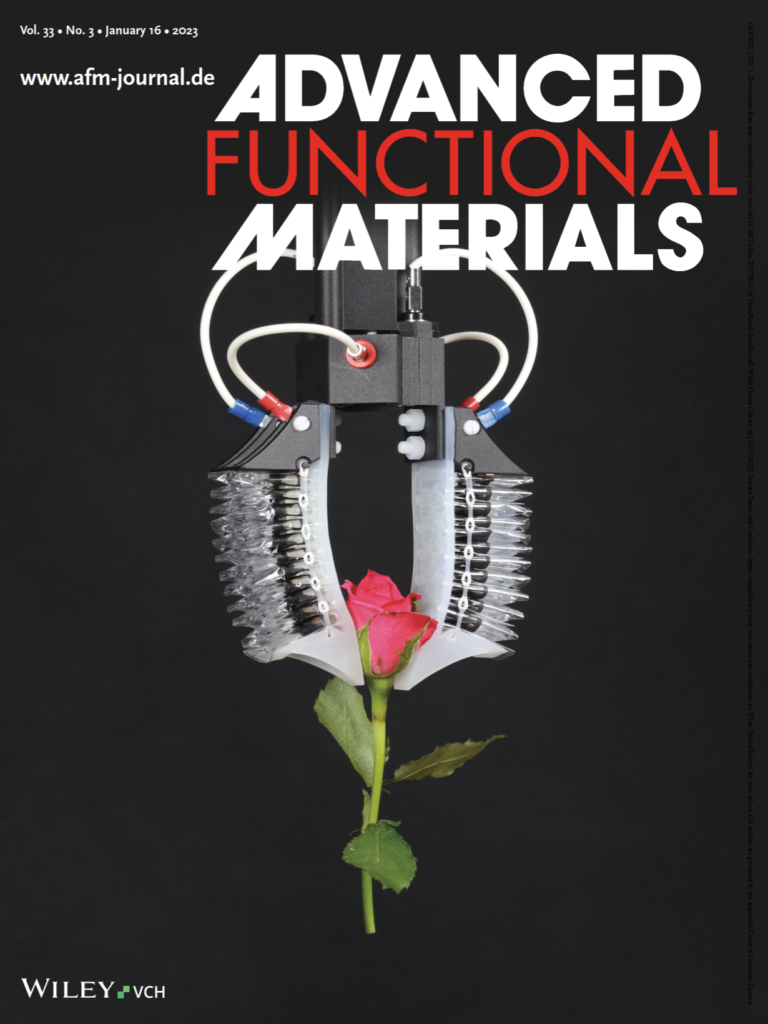
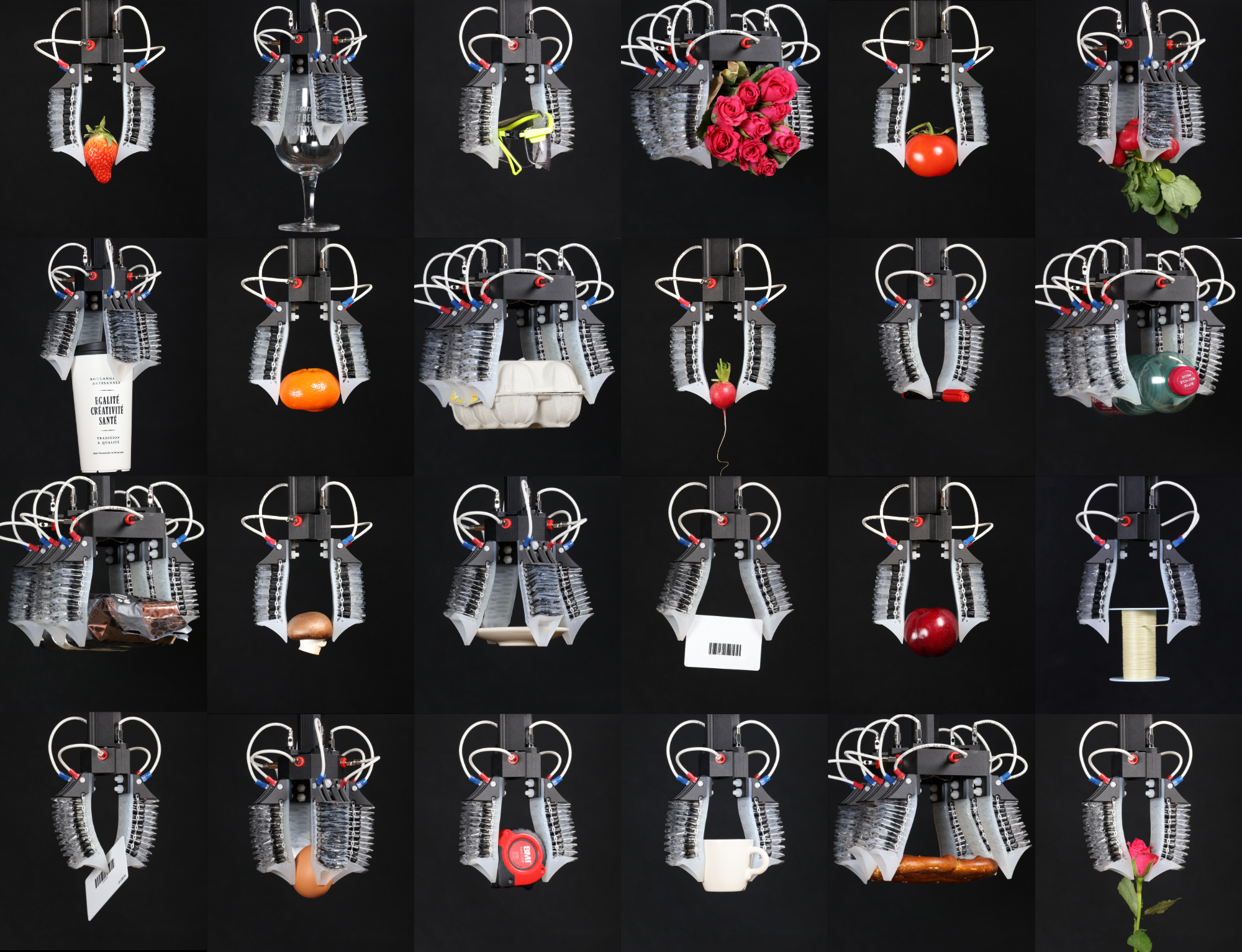
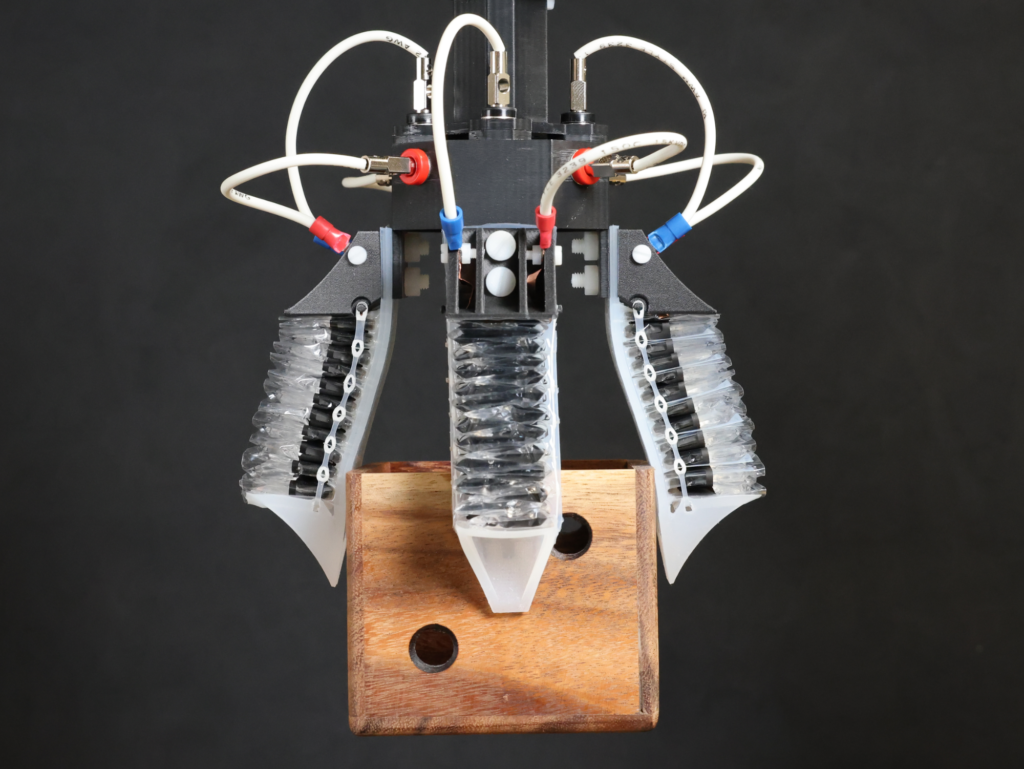
Self-sensing soft gripper
[Project page] [DOI]
Soft and conformal electrohydraulic grippers pick a wide variety of objects with ease, and capacitive self-sensing gives them an embedded sense of touch.

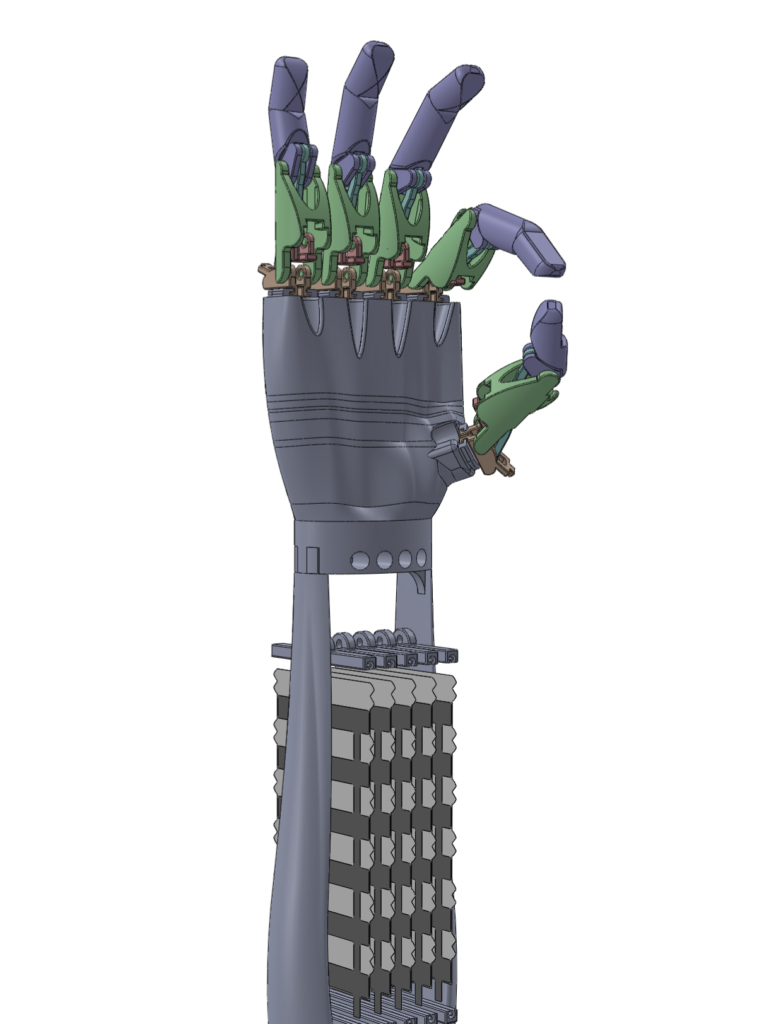
Prosthetic devices
[Project page] [DOI]
Electrohydraulic artificial muscles enable fast, bio-inspired and performant upper-limb prosthetic devices.
Photo gallery.