Yoder Z, Kellaris N, Chase-Markopoulou C, Ricken D, Mitchell SK, Emmett MB, Weir RF ff, Segil J and Keplinger C (2020) Design of a High-Speed Prosthetic Finger Driven by Peano-HASEL Actuators. Front. Robot. AI 7:586216. doi: 10.3389/frobt.2020.586216
Motivation
Upper limb prostheses have great potential to restore lost capabilities to the user. Yet adoption of powered upper-limb prosthetic devices remains low, with users opting for simpler, body-powered devices. The main complaints of users include heating during use, heavy weight, slow actuation and lack of biomimetic form factor.
Approach
HASEL artificial muscles have a biomimetic form factor and linearly contract upon actuation – fundamentally different from rotational DC motors and eliminating the need for transmission systems. Further, HASELs actuate rapidly and don’t heat up during use. We hypothesized that these actuators could provide a new approach to upper-limb prosthetic devices.
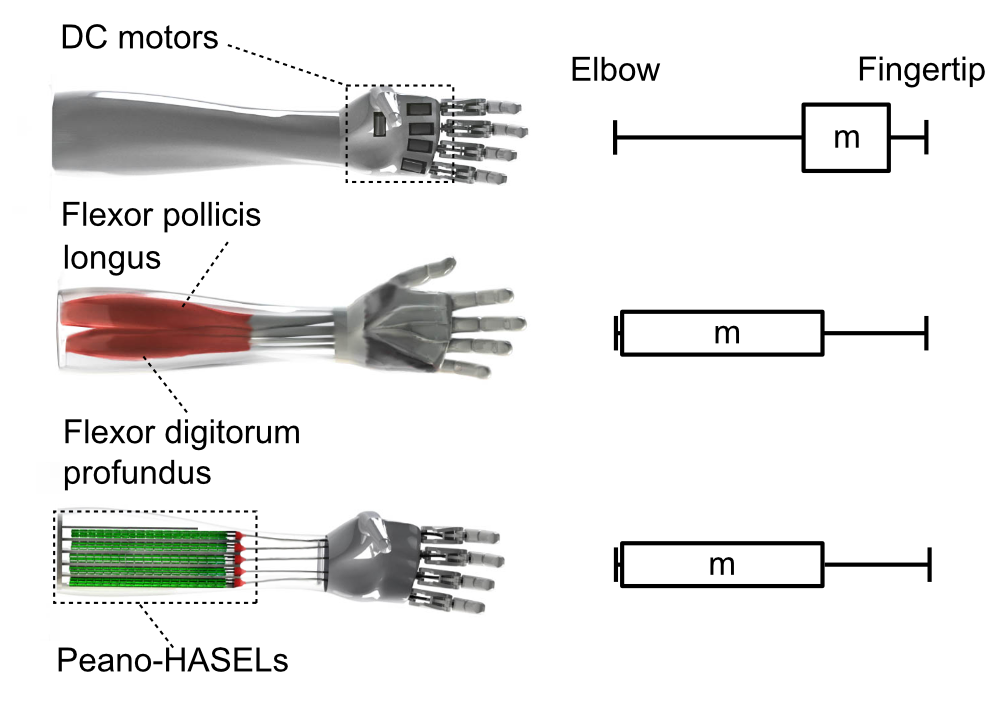
HASEL artificial muscles more closely resemble intact limbs, enabling a different distribution of weight than prosthetics with motors mounted in the palm.
Modeling the prosthetic finger
Commercially available prosthetic fingers are designed for use with DC motors with constant output torque. Conversely, HASEL actuators have a muscle-like, non-linear force-stroke curve. We therefore needed to modify the design of such prosthetic fingers for use with HASEL actuators.
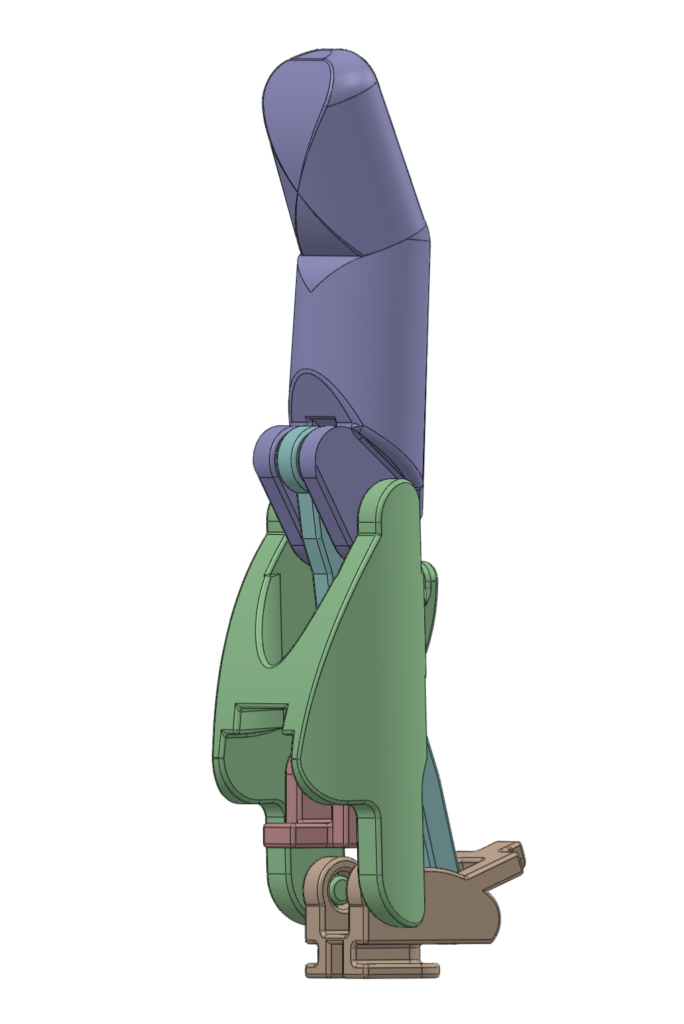
We modeled the finger as a six-bar linkage and optimized various parameters to increase the force output and range of motion of the finger, while maintaining the biomimetic shape.
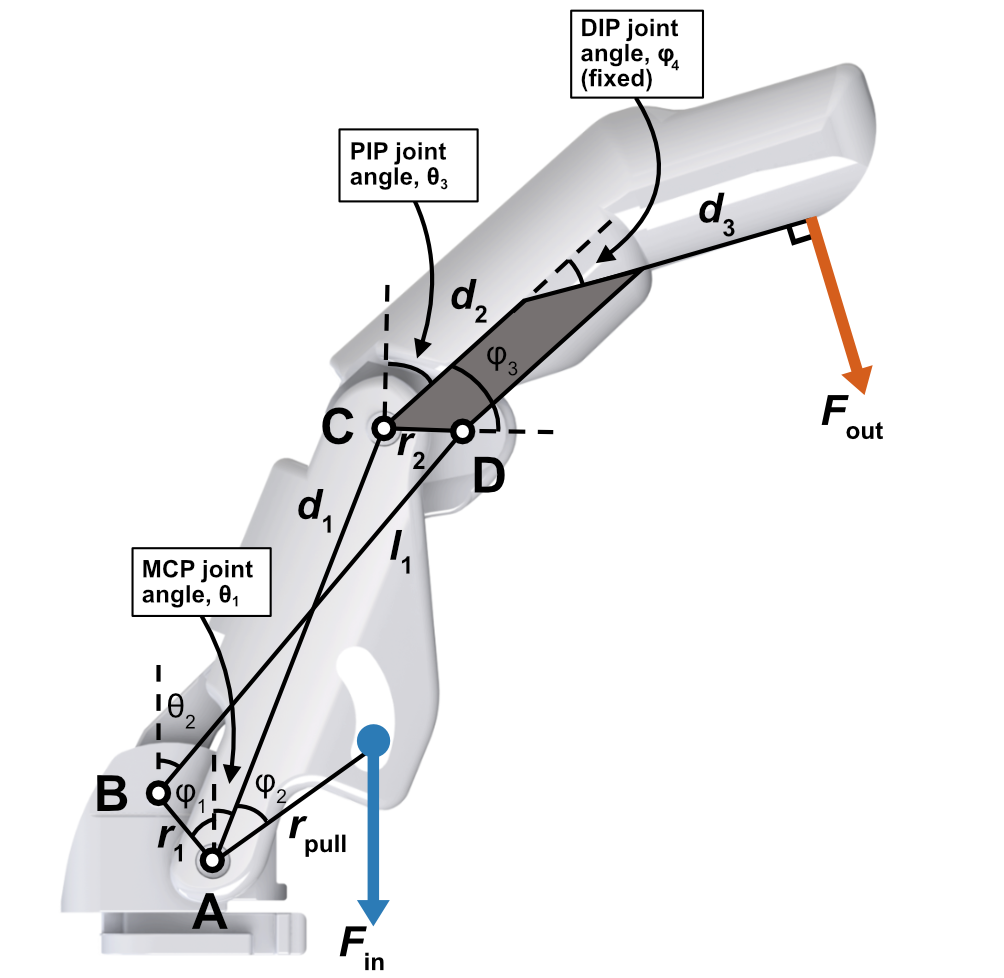
Modelling the prosthetic finger as a six-bar linkage.
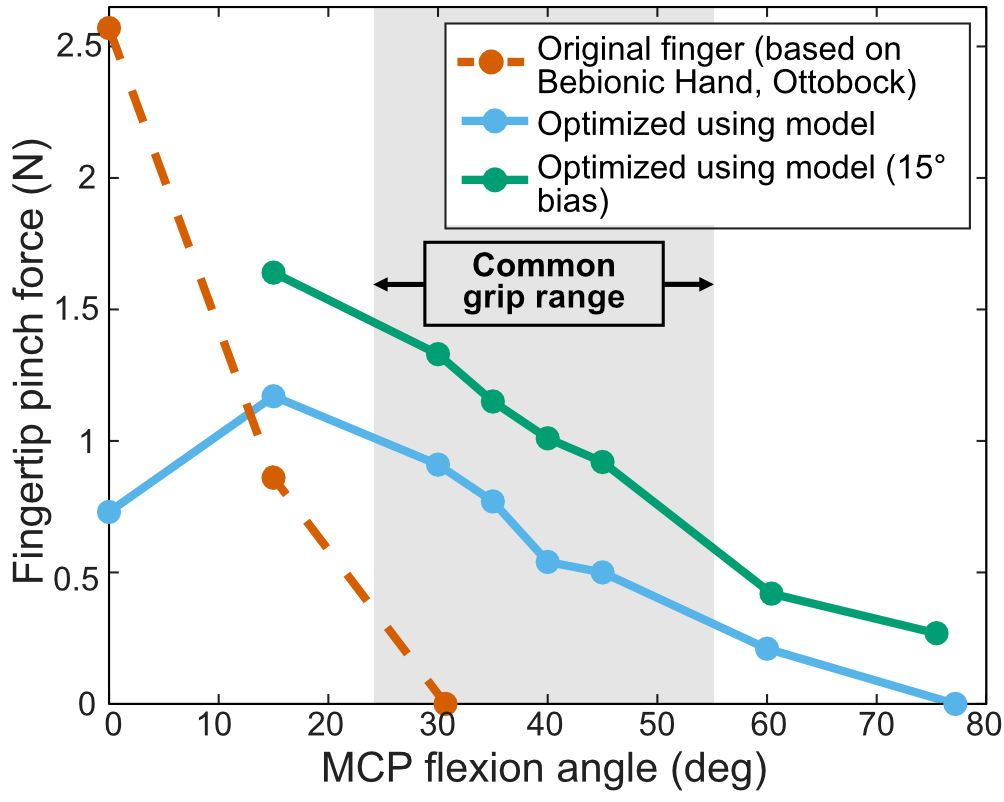
Our model enabled a substantial increase in the range of motion of the finger and higher pinch forces within a commonly used range.
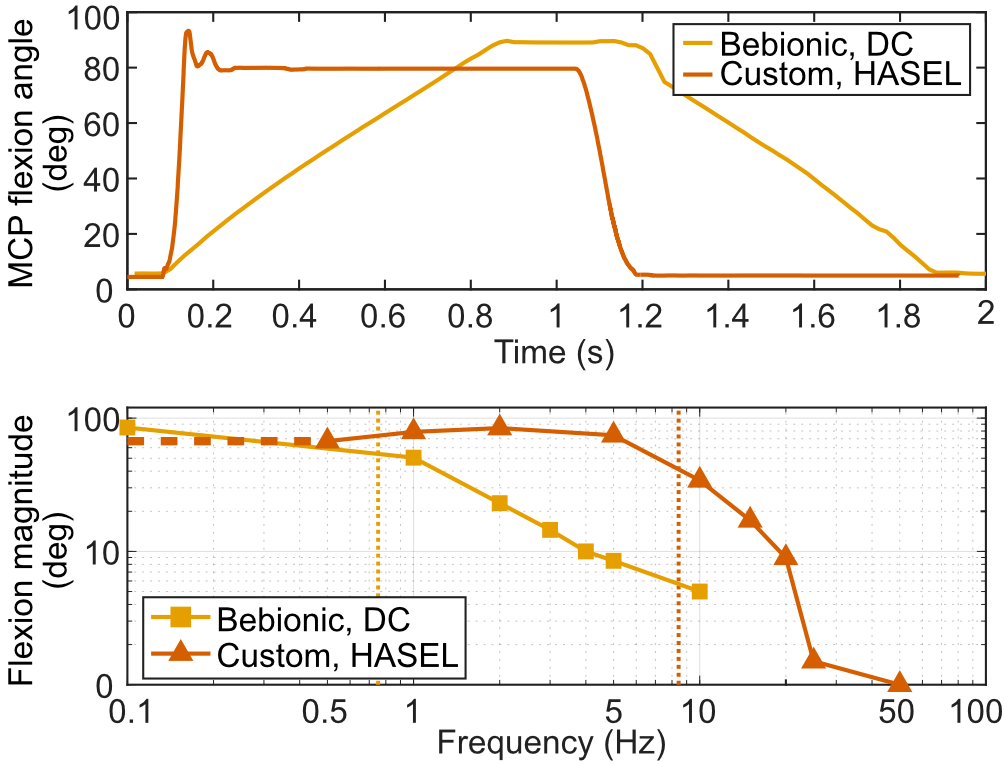
Peano-HASEL actuators enable both slow, controlled actuation and fast, powerful motions.
High-speed actuation
The HASEL-powered finger demonstrated was capable of high-speed and high-frequency actuation — substantially faster than the DC motor.
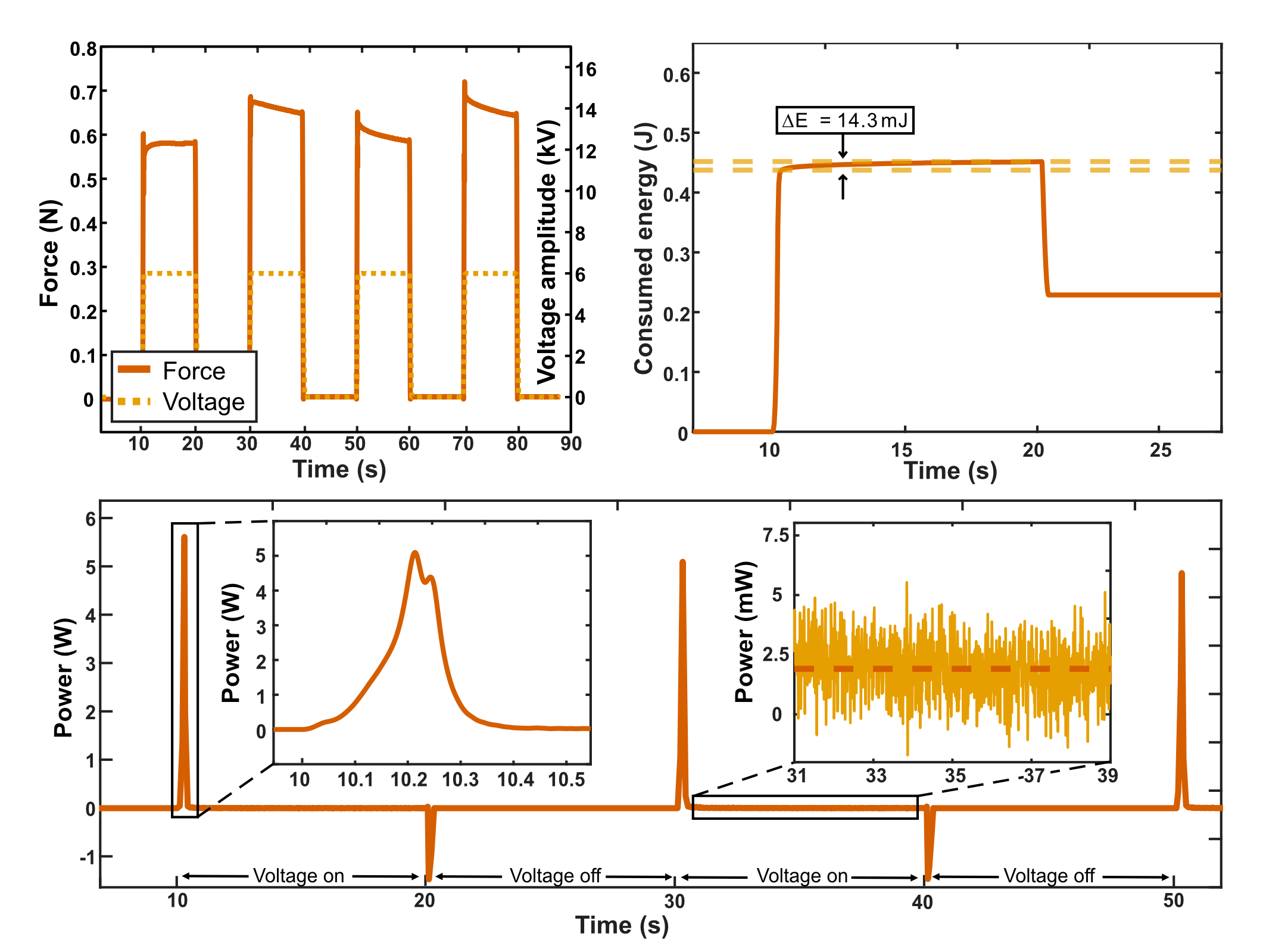
Low power consumption
The HASEL-powered finger demonstrated low power consumption for a pinch-and-hold — about 10x less than the finger powered by a DC motor.

Five-finger prosthetic hand
We built on the design of a single finger and combined it with another key development – a modular, multi-channel high-voltage control system, which allowed us to easily control multiple HASEL actuators from a single, compact power supply.
Development of this modular high-voltage control architecture is ongoing.

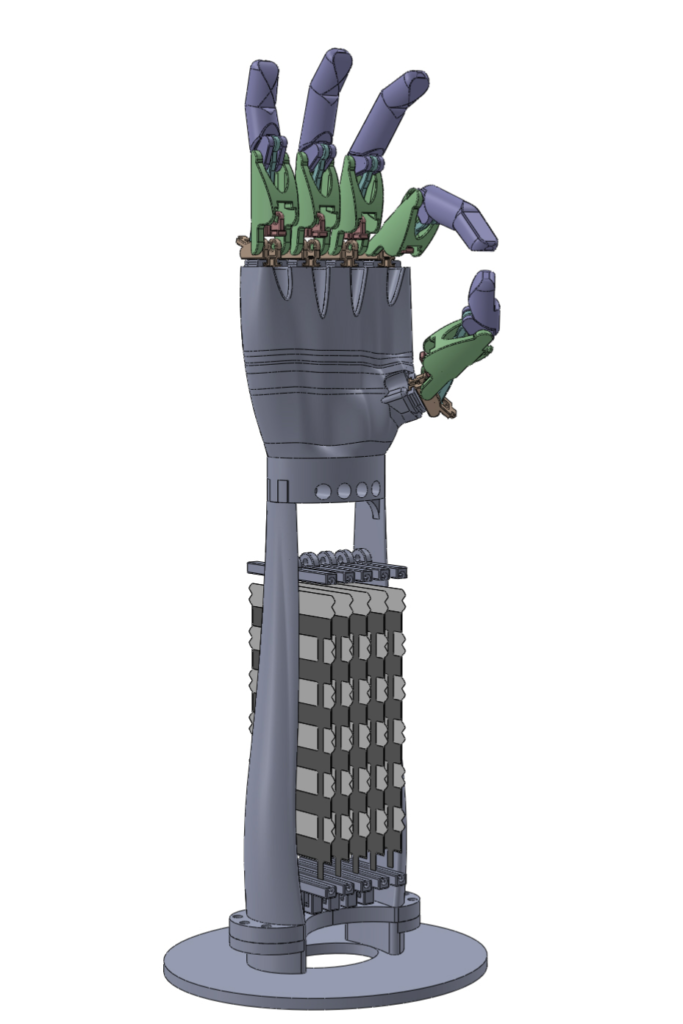
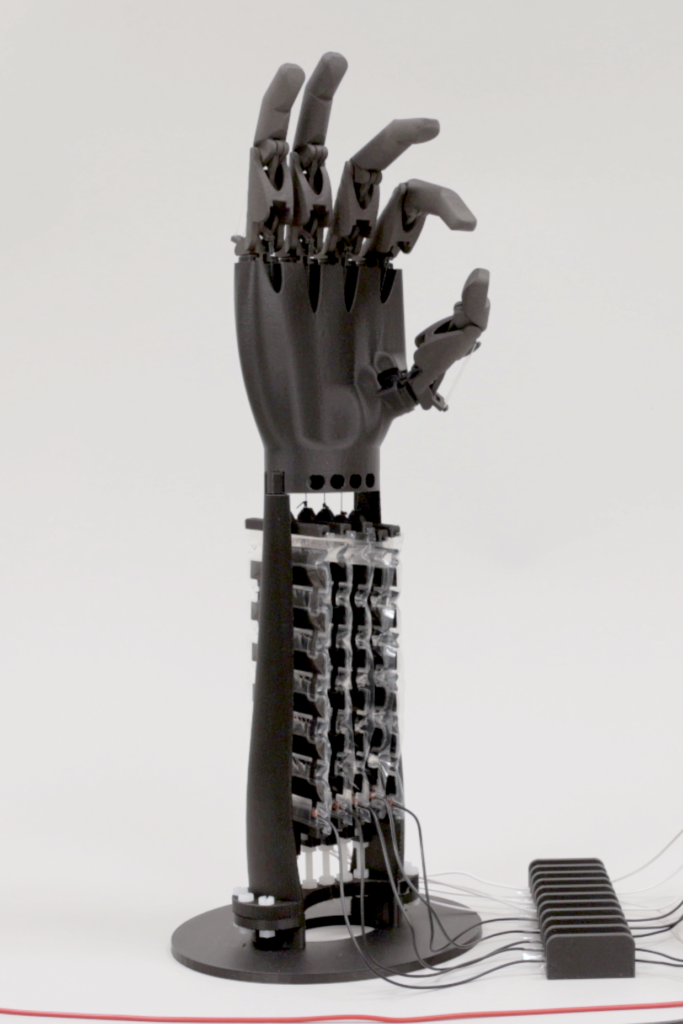
The prototype prosthetic hand features fast actuation and a biomimetic form-factor.
Published article – prosthetic finger
Published article – modular, multi-channel high-voltage control
Coming soon…







