Z. Yoder, E. H. Rumley, I. Schmidt, C. Keplinger, Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots. Sci. Robot. 9, eadl3546 (2024). DOI: 10.1126/scirobotics.adl3546
Co first-author with Ellen H. Rumley
Motivation
Robots made from reconfigurable modules are more versatile, sustainable and cost-effective than their fixed counterparts. And modules driven by soft actuators enjoy the well-established benefits of soft robotics, including inherent adaptability, safer interaction, and wide design freedom. Current soft reconfigurable modules lack high-speed and high-stroke actuation, elegant connection mechanisms, and driving methods suitable for untethered operation – key attributes for driving agile, mobile robots.
Actuation approach
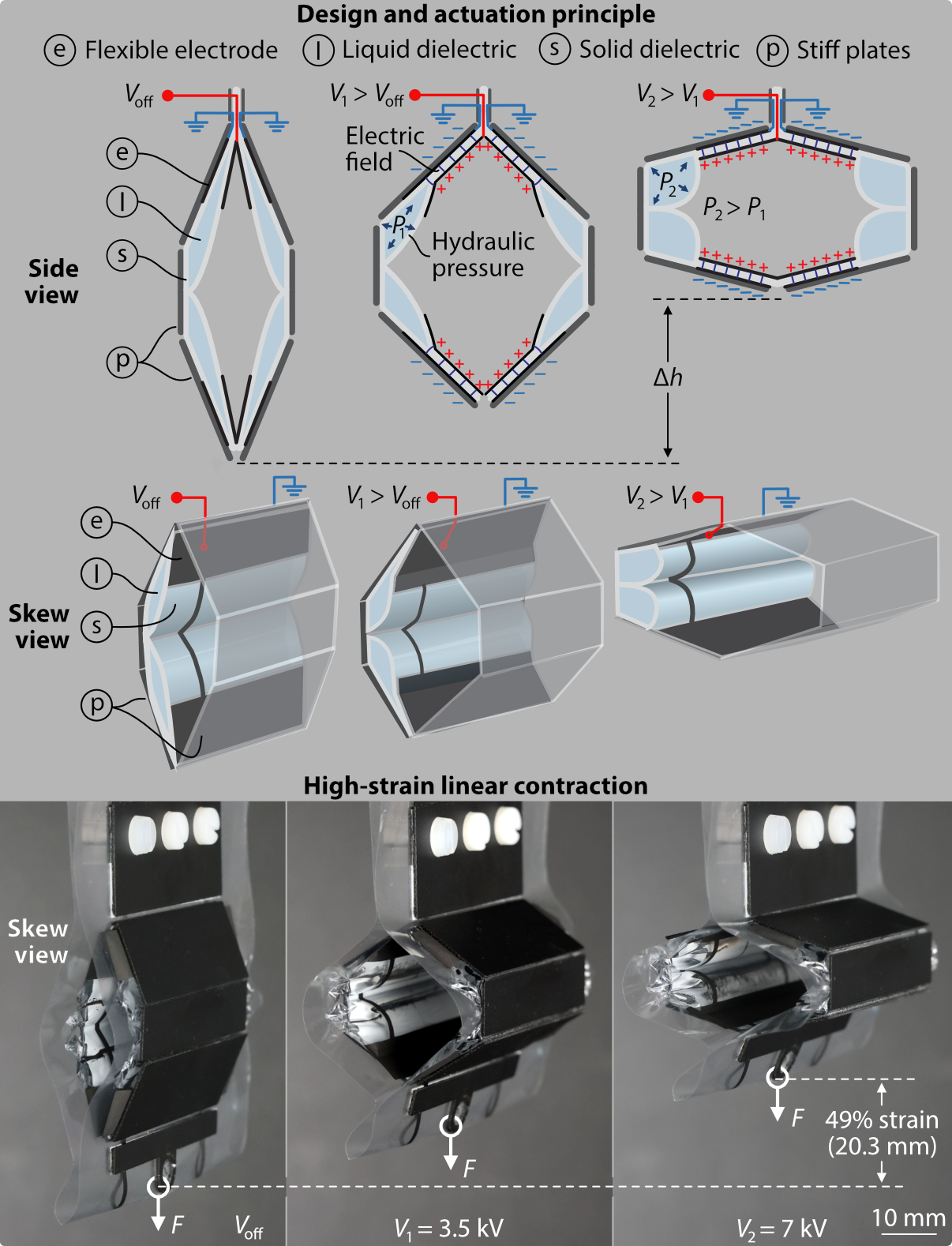
Most terrestrial creatures use stiff materials, like bones and exoskeletons, to amplify the stroke produced by soft muscle and effectively translate forces and torques throughout their bodies. Following this approach, we integrated soft electrohydraulic artificial muscles into a rigid, hexagonal six-bar linkage for high-performance robotic modules. This synergetic combination of soft and rigid components serves to both amplify the stroke and speed of the muscles and to provide a structure for robots composed of many modules.
High-speed, high-stroke multi-modal actuation enables robots with new capabilities, such as a high-jumping robot and a fast-crawling robot.
Reconfigurable modules
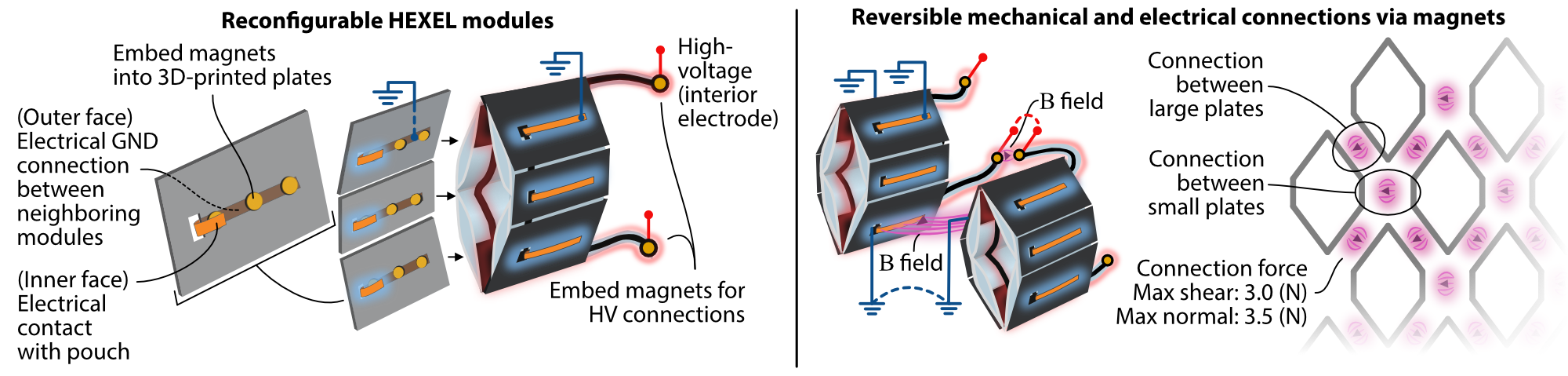
Each module has a self-contained, symmetric, hexagonal shape. And the rigid plates that compose the exoskeleton of each module provide a workspace for embedding further functionality, like connections between modules. We integrated elegant, snap-together electrical and mechanical magnetic connections between modules which enable them to serve in building blocks in reconfigurable robots. These robots can therefore achieve tasks not possible by individual modules alone, and can be rapidly reconfigured for diverse behavior.
Reconfigurable contractile muscles
Reconfigurable active platform
Rolling robot: “Wheel-Bot”
Snap-supply
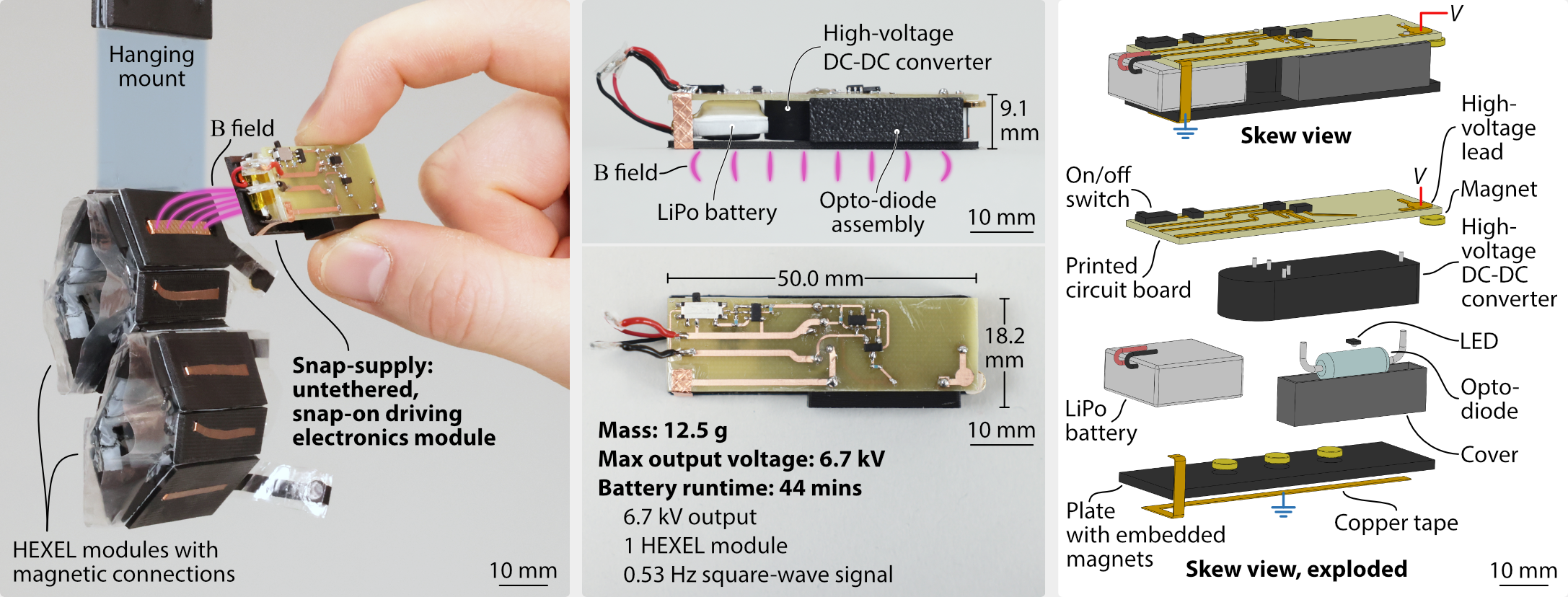
An untethered, snap-on high-voltage driving electronics module
Bench-top high-voltage amplifiers are typically heavy and bulky. We designed a battery-powered, snap-on, high-voltage driving electronics module to enable untethered operation of HEXEL modules. The electronics modules includes a high-voltage power supply, a battery, an opto-diode for discharging, and a circuit for control.
Published article
The definitive version of this work was published in Science Robotics on 18 September 2024, DOI: [10.1126/scirobotics.adl3546].
Featured photo



