My portfolio.



Click image to jump to project.
Background.
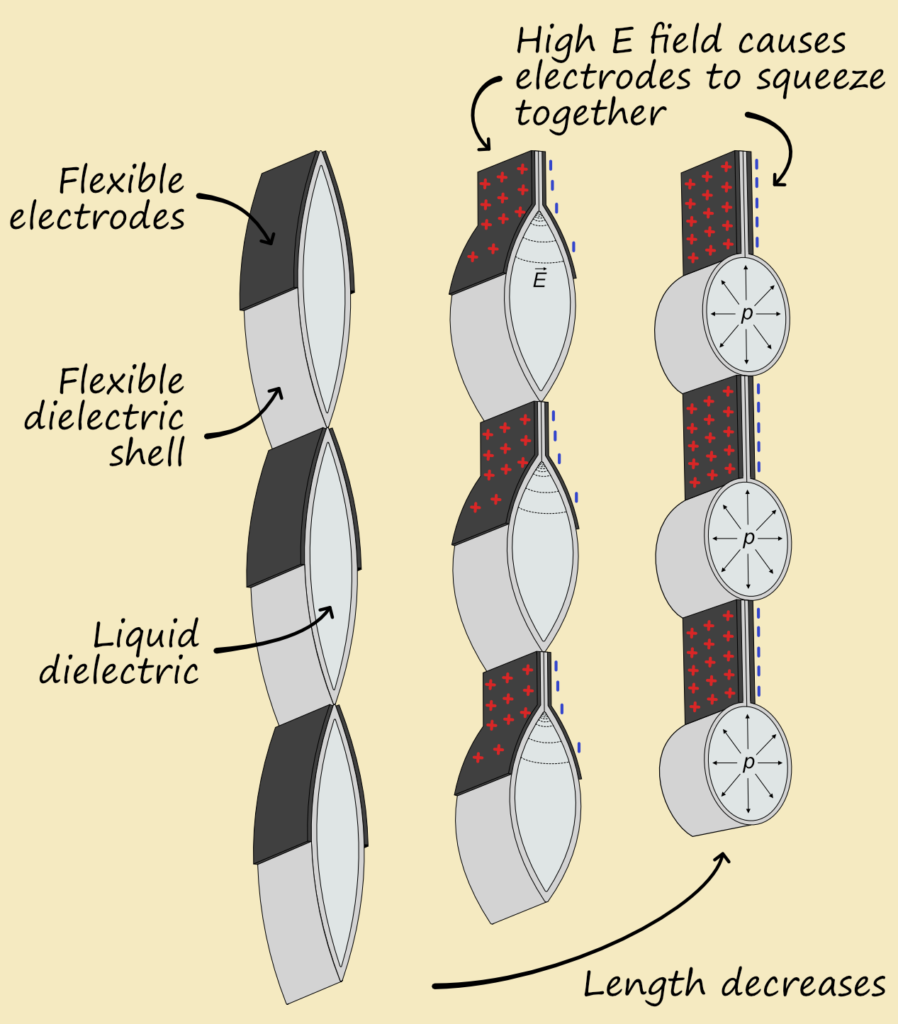
Idea: my research group invented HASEL artificial muscles; I want to leverage these for a new generation of soft/rigid robots.
Coulombic attraction forces cause opposing electrodes to squeeze together, locally pumping fluid and driving shape-change of a flexible thermoplastic pouch.
High voltages (5-15 kV) are needed to create sufficiently high Coulombic forces.
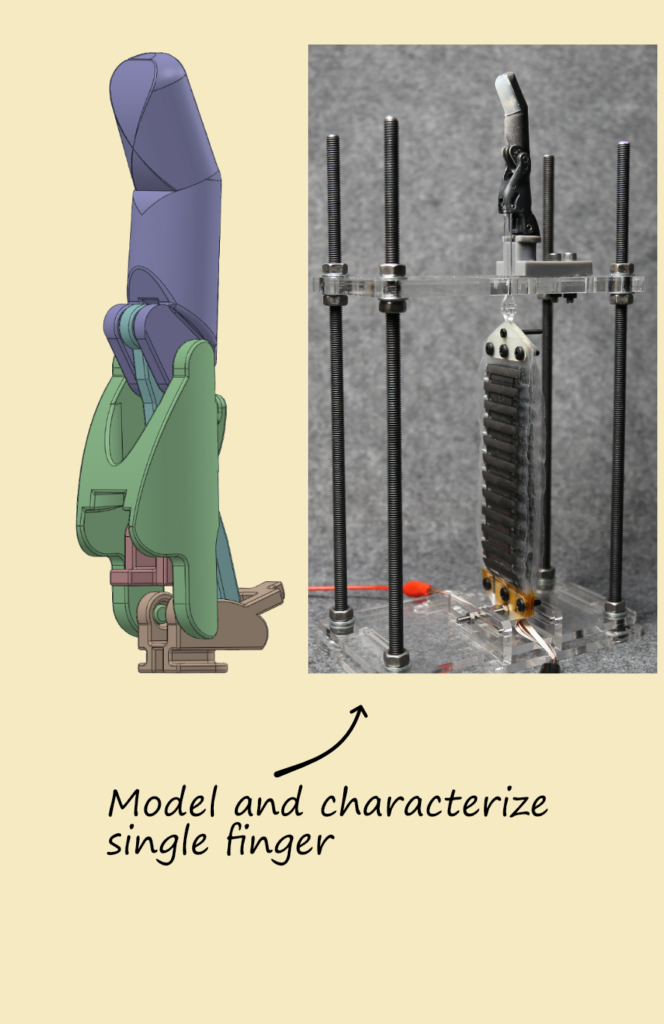
Prosthetics.
[Project page] [DOI]
Idea: restore upper-limb functionality with artificial muscles.
I modeled, designed, fabricated, and tested prosthetic fingers and hands driven by HASELs.
Challenges: optimizing the kinematic finger linkage for HASEL force-stroke curve; hand-fabricating actuators.
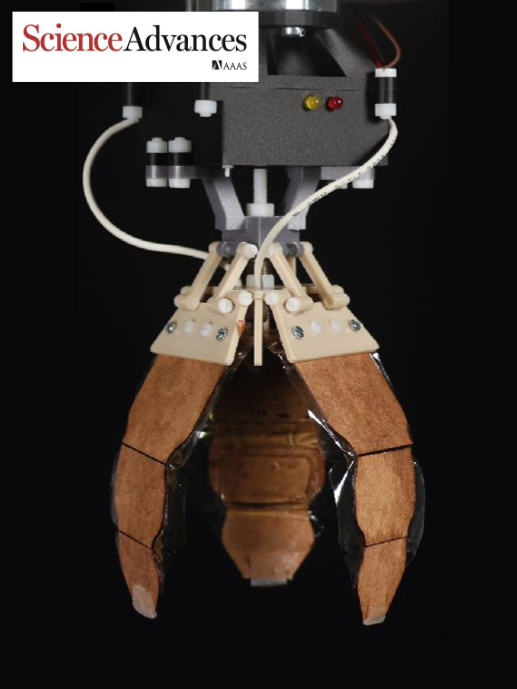
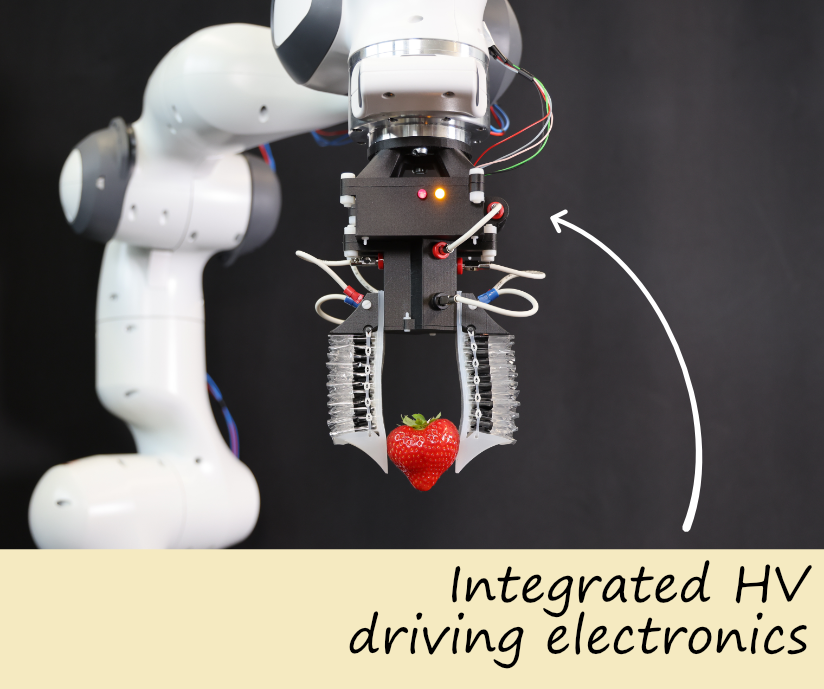
Self-sensing end-effectors.
[Project page] [YouTube] [DOI]
Idea: conform to target object using soft materials; use changing actuator capacitance for sensing.
I designed, fabricated, and tested versatile, soft end-effectors with capacitive sensing feedback.
Challenges: fabricating multi-material structure; impedance spectroscopy for sensing capacitance at high voltage; integrating high-voltage driving electronics.
I later mentored a Bachelors student who used neural networks to further improve the sensory feedback.


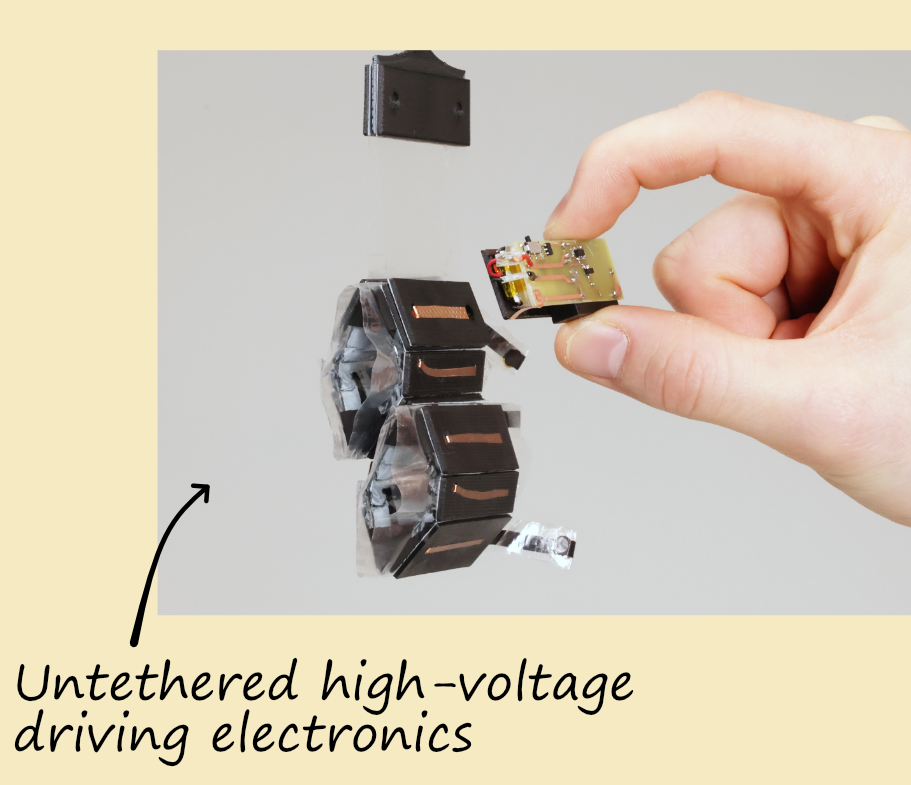
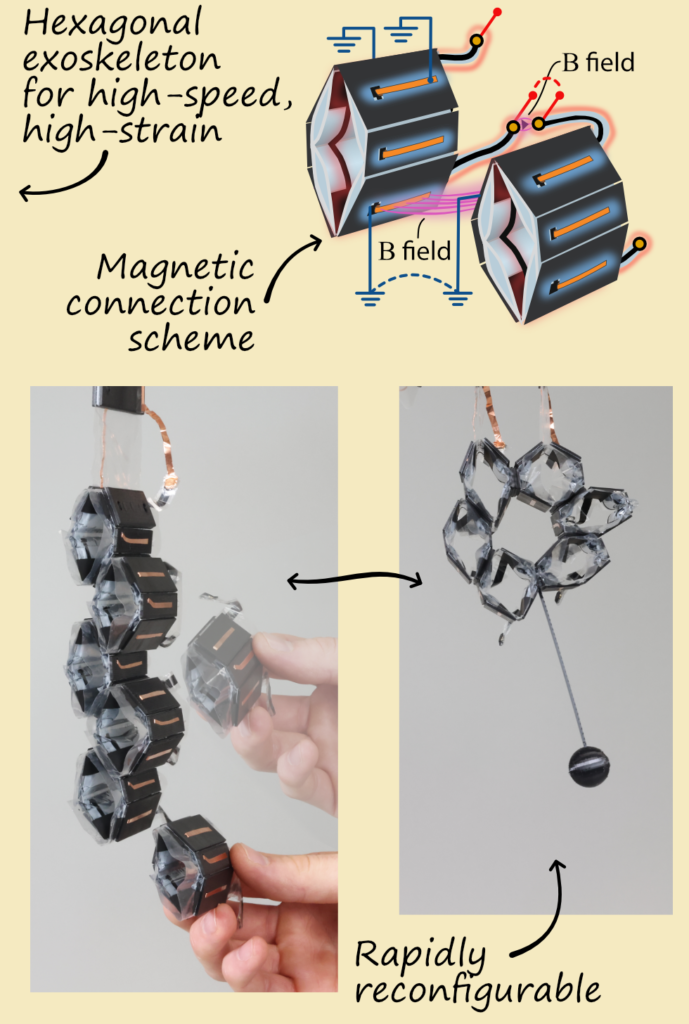
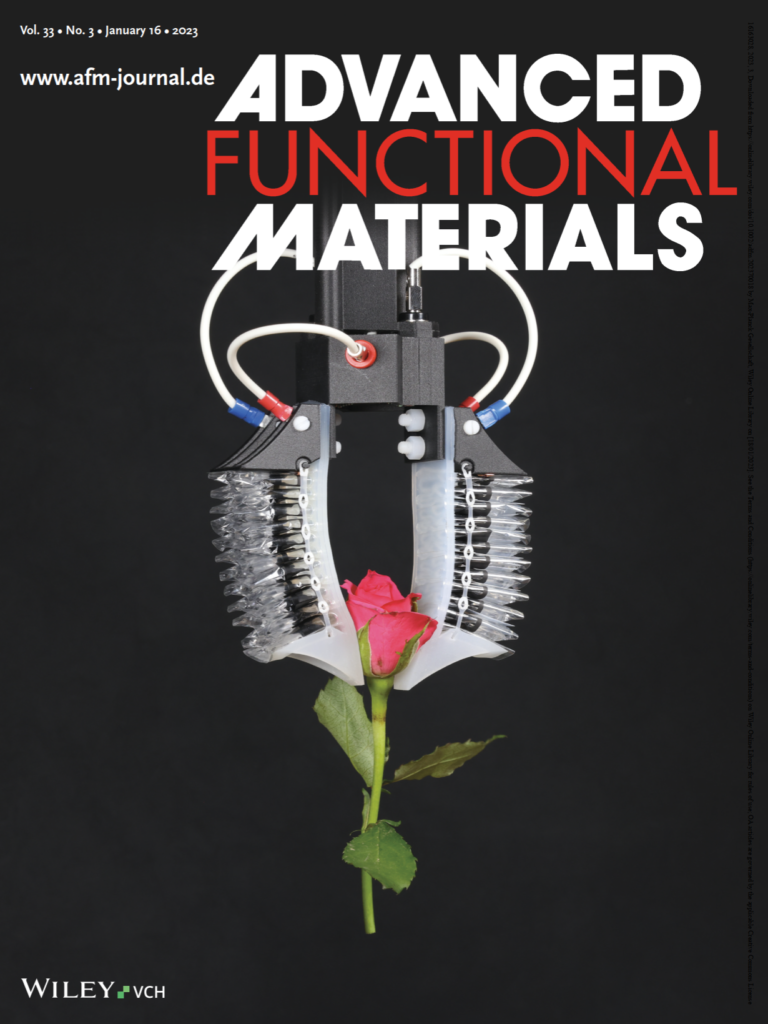
Reconfigurable robots.
[Project page] [YouTube] [DOI]
Idea: couple soft muscles with rigid components to amplify speed and strain; use hexagonal structure as repeating units in arrays.
I designed, modeled, and tested high-speed, high-strain hexagonal modules. I developed an elegant connection scheme for reconfigurable arrays of many modules.
Challenges: many design + test iterations, minimum energy model of modules; elegant mechanical and electrical connection scheme; compact, untethered, high-voltage electronics.
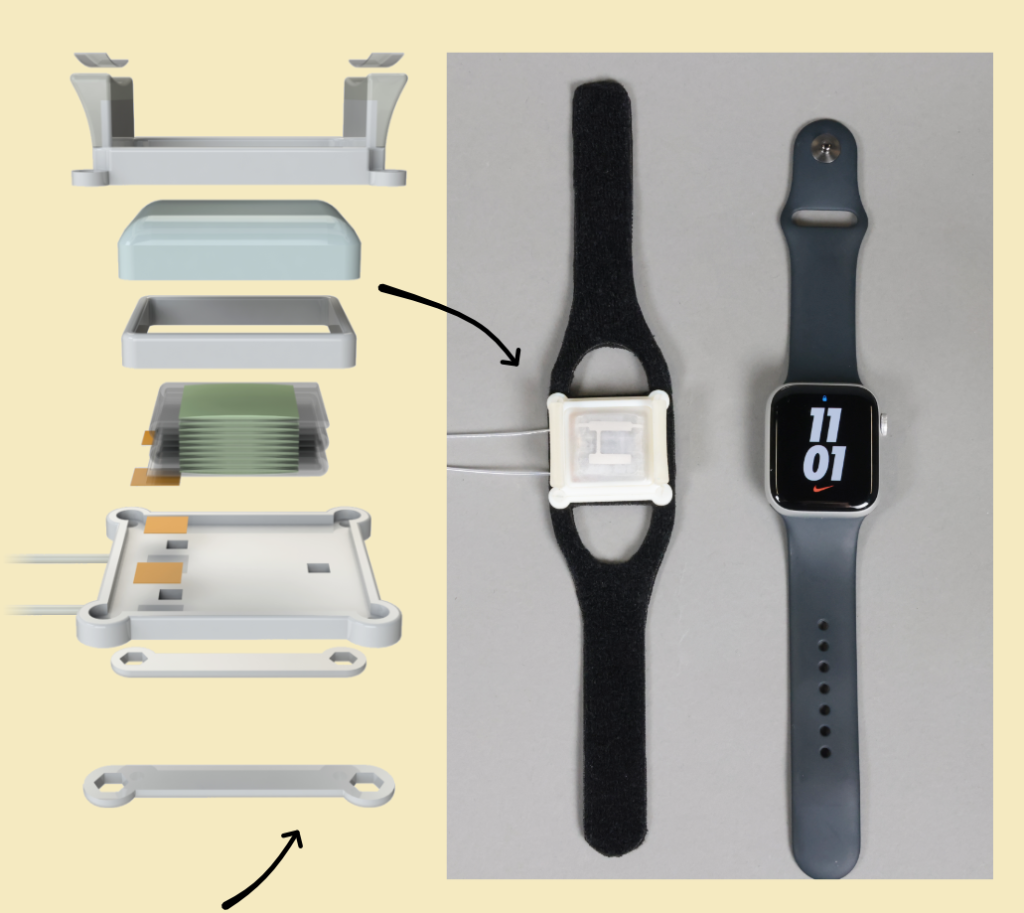
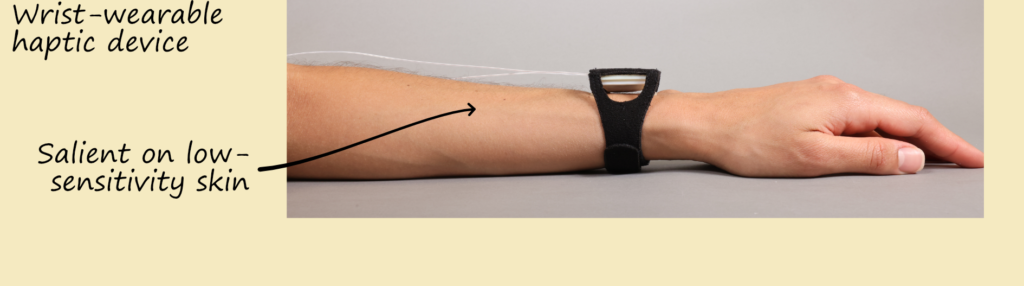
Haptic devices.
[Project page] [Youtube] [DOI]
Idea: leverage diverse, broad-bandwidth actuation of HASELs for rich haptic feedback.
I designed and tested haptic feedback devices driven by HASELs. I implemented a high-voltage safety scheme and developed the full stack for a graphical user-study interface.
Challenges: saliency on low-sensitivity (non-glabrous) skin; downscaling of actuators; high-voltage safety; user-study design and execution.

Other work.